LtlOpt
Overview
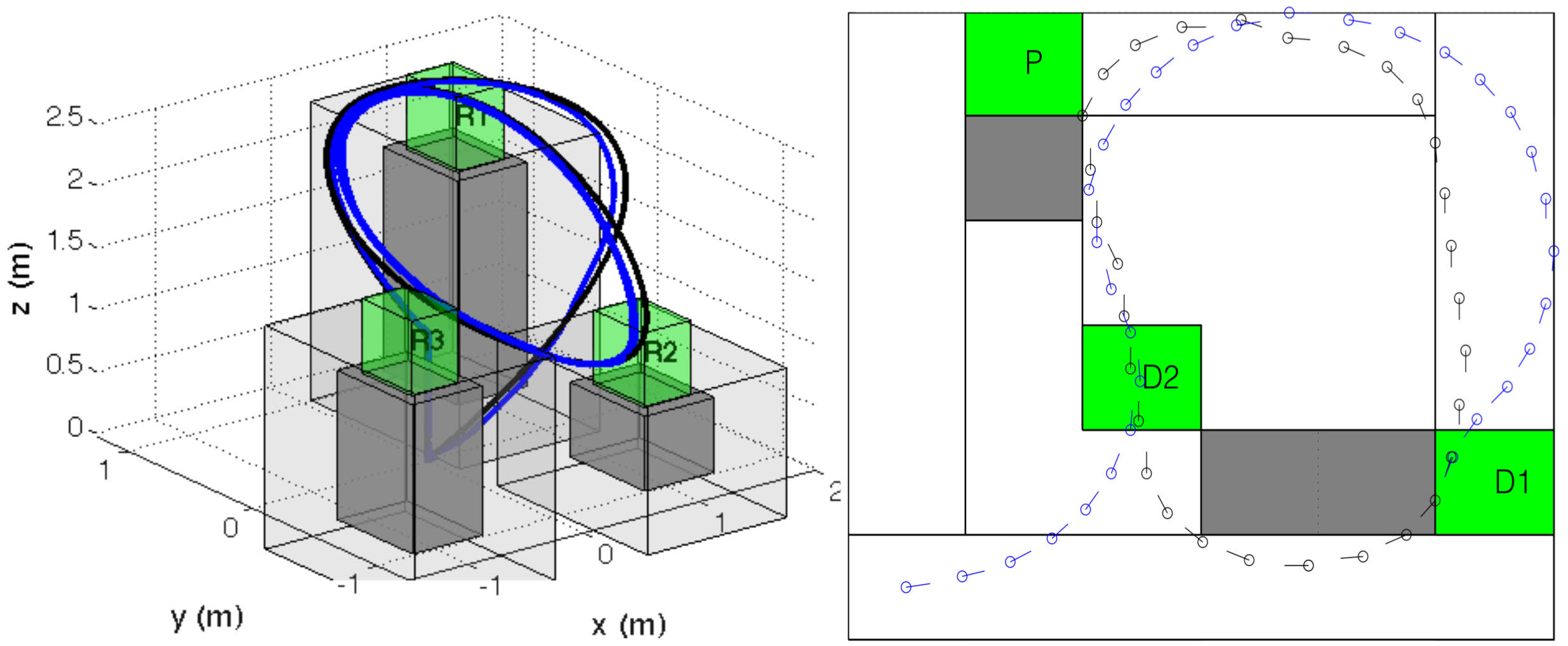
LtlOpt is a Matlab tool for the optimal control of high-dimensional, nonlinear robotic systems with linear temporal logic (LTL) specifications.
 |
Download
You can download a preliminary version of LtlOpt here. Please see the included README for installation instructions.
Hello World
Install (see README) and run mainLTL.m, mainPt2Pt.m, or mainGuided.m. It is that easy!
References
The papers below detail the theory behind LtlOpt. If you use LtlOpt in your research, please cite the paper most relevant to your use.
Optimization-based trajectory generation with linear temporal logic specifications.
E. M. Wolff, U. Topcu, and R. M. Murray. International Conference on Robotics and Automation (ICRA), 2014.Optimal control of nonlinear systems with temporal logic specifications.
E. M. Wolff and R. M. Murray. International Symposium on Robotics Research (ISRR), 2013.Automaton-guided controller synthesis for nonlinear systems with temporal logic.
E. M. Wolff, U. Topcu, and R. M. Murray. International Conference on Intelligent Robots and Systems (IROS), 2013.
Contact
Please email me comments, bug reports, or feature requests.